PILOTE AUTOMATIQUE
Mise en situation
Le pilote automatique de bateau, indispensable lors d'une navigation en solitaire de longue durée,
évite au marin d'être rivé à la barre en permanence. Il peut ainsi se reposer ou effectuer des manoeuvres.
L'objectif de l'étude est de choisir le moteur électrique permettant le déplacement de la tige du pilote,
dans le respect du cahier des charges.
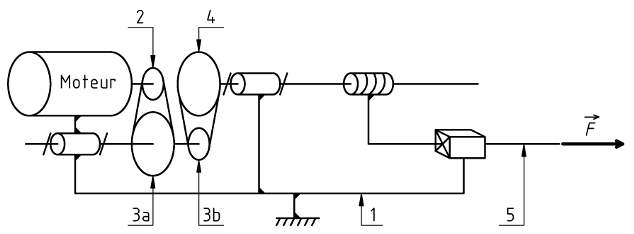
Le schéma cinématique ci-dessous présente le vérin électrique.
Le moteur entraîne un réducteur à deux étages de poulies et courroies crantées.
La poulie de sortie 4 est reliée à la vis sur laquelle est monté l'écrou lié à la tige 5 du pilote.
Hypothèses et données
- Force de poussée sur la tige du pilote : F = 200 N
- Course de la tige du pilote : c = 250 mm
- Temps de déplacement pour cette course : t = 10 s
- Liaisons pivot et liaison glissière : Parfaites (frottements négligés)
- Rendement de chaque couple poulies-courroie : η1 = 0,95
- Rendement du système vis-écrou : η2 = 0,85
- Pas de la vis : p = 2 mm
- Nombres de dents des poulies :
| Poulie crantée | 2 | 3a | 3b | 4 |
|---|
| Nombre de dents | 18 | 50 | 20 | 40 |
|---|
Etude demandée
- Proposer un diagramme des flux d'énergie de ce pilote automatique.
- Calculer la vitesse de déplacement V de la tige 5 du pilote, en m/s.
- En déduire la vitesse angulaire ω4 de la vis d'entraînement 4, en rad/s.
- Quel est le couple C4 sur la vis d'entraînement 4, en N.m?
- Déterminer le rapport de transmission i du réducteur à deux étages de poulies et courroies crantées.
- En déduire la vitesse angulaire ω du moteur, en rad/s.
- Déterminer le rendement global η du réducteur à deux étages de poulies et courroies crantées.
- Quel est le couple utile C exercé par le moteur électrique, en N.m?
- Conclure en indiquant :
- La puissance utile P du moteur, en W.
- La fréquence de rotation N du moteur, en tr/min.