

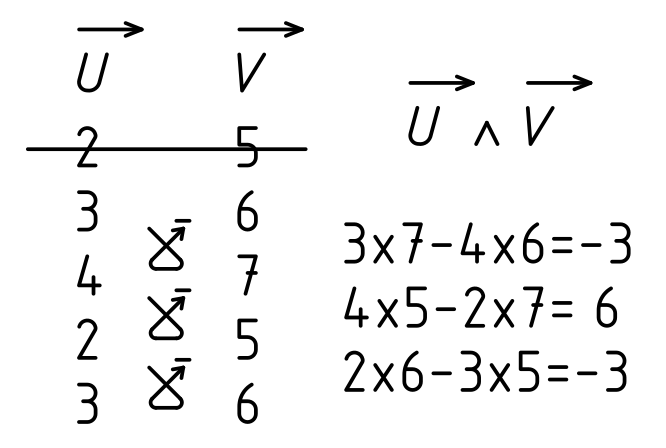
- Les deux premières lignes permettent de calculer la coordonnée en x.
- Les deux lignes du milieu la coordonnée en y.
- Et les deux dernières lignes la coordonnée en z.
Si on indique, par exemple, une vitesse du vent de 20 km/h, on ne sait pas si le vent vient du nord, de l'ouest ou du sud-est. Pour cette raison, il est commode de définir la vitesse avec un vecteur. Il permet de connaître, en plus de la force du vent, sa direction et son sens.
La mécanique s'appuie sur les mathématiques. Si certaines grandeurs se définissent avec un nombre généralement suivi d'une unité, d'autres grandeurs s'expriment avantageusement avec des vecteurs.
Le vecteur est un outil mathématique qui définit :
Remarques :

Soit [vec]V [/vec] un vecteur de coordonnées a, b et c. Les notations ci-dessous sont équivalentes :
Soient A et B deux points de coordonnées connues : A ( xA ; yA ; zA ) et B ( xB ; yB ; zB )
On a : [vec]AB [/vec] ( xB-xA ; yB-yA ; zB-zA )
Soit [vec]V [/vec] un vecteur de coordonnées a, b et c connues. La norme de [vec]V [/vec] se calcule avec la relation :
[mod] [vec]V [/vec] [/mod] = [rac]a2 + b2 + c2[/rac]
L'angle orienté entre deux vecteurs [vec]U [/vec] et [vec]V [/vec] se note ( [ang][vec]U[/vec] ; [vec]V [/vec][/ang] ).
Pour un même angle orienté, il existe une infinité de mesures. La mesure principale appartient à l'intervalle ] – π ; π ]. Une mesure peut être positive ou négative, le sens trigonométrique étant positif et le sens horaire négatif.

Pour une mesure α connue on écrit :
Soit le vecteur [vec]V [/vec] parallèle au plan (Oxy) dont l'angle orienté α = ( [ang][vec]x[/vec] ; [vec]V [/vec][/ang] ) et la norme sont connus.

Les coordonnées a, b et 0 de [vec]V [/vec] se calculent avec les relations :
a = [mod][vec]V [/vec][/mod].cos(α)
b = [mod][vec]V [/vec][/mod].sin(α)
En somme : [vec]V [/vec] [par][mod][vec]V [/vec][/mod].cos(α) ; [mod][vec]V [/vec][/mod].sin(α) ; 0[/par]
Soit le vecteur [vec]V [/vec] parallèle au plan (Oxy), dont les coordonnées a b et 0 sont connues.
Les angles orientés α = ([ang]a.[vec]x[/vec], [vec]V [/vec][/ang]) et β = ([ang][vec]V [/vec], b.[vec]y[/vec][/ang]) se calculent avec les relations :
tan(α) = [div]b[sur]a[/div] ⇒ α = Arctan[par][div]b[sur]a[/div][/par]
tan(β) = [div]a[sur]b[/div] ⇒ β = Arctan[par][div]a[sur]b[/div][/par]
β = 90° - α

Soit deux vecteurs [vec]U[/vec] et [vec]V[/vec] et α = ( [ang][vec]U[/vec] ; [vec]V [/vec][/ang] ). Le produit scalaire de [vec]U[/vec] par [vec]V[/vec], noté [vec]U[/vec] . [vec]V[/vec], est le nombre réel tel que :
[vec]U[/vec] . [vec]V[/vec] = [mod][vec]U[/vec][/mod] × [mod][vec]V[/vec][/mod] × cos α

Si [vec]U[/vec] (u1; u2; u3) et [vec]V [/vec] (v1; v2; v3) alors [vec]U[/vec] . [vec]V[/vec] = u1.v1+u2.v2+u3.v3
Soit deux vecteurs [vec]U[/vec] et [vec]V[/vec] et α = ( [ang][vec]U[/vec] ; [vec]V [/vec][/ang] ). Le produit vectoriel de [vec]U[/vec] par [vec]V [/vec], noté [vec]U[/vec] ∧ [vec]V [/vec], est le vecteur [vec]W[/vec] tel que :

Si [vec]U[/vec] (u1; u2; u3) et [vec]V[/vec] (v1; v2; v3) alors [vec]U[/vec] ∧ [vec]V[/vec] (u2.v3-u3.v2 ; u3.v1-u1.v3 ; u1.v2-u2.v1)
Il existe plusieurs manières d'effectuer un produit vectoriel. La méthode proposée ci-dessous prend comme exemple [vec]U[/vec] ( 2; 3; 4 ) et [vec]V[/vec] ( 5; 6; 7 ). Le résultat à trouver est [vec]U[/vec] ∧ [vec]V[/vec] ( -3; 6; -3 ).
Les étapes à suivre sont les suivantes :