
- [vec]VB 1/2[/vec] est perpendiculaire à (IB).
- Le sens de [vec]VB 1/2[/vec] est donné par le sens de rotation du solide.
- VB 1/2 = IB . ω1/2
L'étude des mouvements plans s'intéresse essentiellement aux vitesses
et aux trajectoires des points, les vitesses étant tangentes aux trajectoires.
La cinématique plane, s'appuyant sur de nombreux tracés, se nomme
communément cinématique graphique
.
Le mouvement d'un solide 1 se définit par rapport à un solide de référence 2.
La vitesse d'un point M lié au solide 1 par rapport au solide 2 se note
[vec]VM 1/2[/vec].
Pour étudier les mouvements de plusieurs points, liés à un même solide en mouvement par rapport à un solide de référence, on utilise :

Pour étudier les mouvements d'un unique point, lié à divers solides en mouvement les uns par rapports aux autres, on utilise la relation de composition des vecteurs vitesse.

La cinématique s’intéresse, pour une bonne part, au mouvement du point, mais il faut remarquer qu’il s’agit du point géométrique et non du point matériel. Cela signifie qu'un point lié à un solide peut éventuellement être situé en dehors de ce solide.
Deux points étudiés, liés à deux solides en mouvement, peuvent occuper la même position à un instant donné. On dit que ces points coïncident.
Considérons une carrosserie, une roue de voiture et une route comme trois solides distincts. Ci-dessous :
Par conséquent :

Le point A lié à la carrosserie 1 et le point A lié à la roue 3 coïncident à l'instant de l'étude.
Un solide est en mouvement plan si chaque point lié à ce solide se déplace dans un plan. Un mouvement plan peut être :
Ci-dessous, un exemple de translation circulaire : Les nacelles du manège tournent en conservant la même orientation.

On montre qu'un mouvement plan quelconque est équivalent à un mouvement de rotation
dont le centre de rotation se déplace.
Ce centre de rotation se nomme centre instantané de rotation
ou CIR.
A l'instant de l'étude, le solide étudié se comporte comme s'il tournait autour du CIR.
On notera que le CIR est le seul point du solide dont la vitesse est nulle.
Soit deux points A et B liés à un même solide 1 en mouvement par rapport à un solide 2. Les supports des vecteurs vitesse [vec]VA 1/2[/vec] et [vec]VB 1/2[/vec] sont supposés connus et non parallèles.
On peut calculer la vitesse VB 1/2, mais on peut également l'obtenir par un tracé. En disposant d'un rapporteur, on mesure l'angle α après avoir tracé [vec]VA 1/2[/vec] en respectant l'échelle choisie. On reporte ensuite l'angle α pour tracer [vec]VB 1/2[/vec]. On détermine enfin VB 1/2 en mesurant la longueur du vecteur correspondant et en tenant compte de l'échelle du tracé.

Si on dispose d'un compas, on peut placer le point B' sur la droite (IA) de telle sorte que IB = IB'. On trace ensuite le vecteur [vec]VB' 1/2[/vec]. Les normes des vecteurs [vec]VB' 1/2[/vec] et [vec]VB 1/2[/vec] sont égales.

La méthode du CIR est inutilisable si le CIR est situé en dehors de la feuille sur laquelle sont effectués les tracés.
Le mouvement de translation est le cas particulier où le CIR est situé à une distance infinie du solide étudié. Les vecteurs vitesse de chaque point du solide sont identiques.
Pour un mouvement de rotation d'un solide 1 autour d'un axe fixe lié à un solide 2 :

Le mouvement de rotation est un mouvement plan dont le CIR reste fixe.
La résolution d'un problème de cinématique plane se fait souvent graphiquement. La position du CIR est parfois située en dehors de la feuille sur laquelle est dessiné le solide étudié. On utilise alors la méthode de l'équiprojectivité.
On montre que pour deux points A et B liés à un même solide 1 en mouvement par rapport à un solide 2, les projections orthogonales de [vec]VA 1/2[/vec] et de [vec]VB 1/2[/vec] sur la droite (AB) sont deux vecteurs identiques.
Dans l'exemple ci-dessous, on a donc : [vec]AK[/vec] = [vec]BL[/vec]

La méthode de l'équiprojectivité est inutilisable si la projection orthogonale du vecteur vitesse donne le vecteur nul. Et si cette projection est de faible longueur, les tracés donneront des résultats peu précis...
Prenons l'exemple d'un voyageur 1 marchant sur un wagon 2 en mouvement par rapport à une gare 3. La vitesse du voyageur 1 par rapport à la gare 3 est celle du train 2 par rapport à la gare 3 à laquelle s'ajoute la vitesse du voyageur 1 par rapport au train 2.
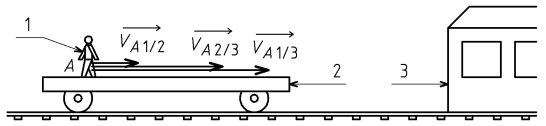
Si le voyageur est situé au point A, alors :
VA 1/3 = VA 1/2 + VA 2/3
Les vitesses étant horizontales, sous forme vectorielle, on obtient :
[vec]VA 1/3[/vec] = [vec]VA 1/2[/vec] + [vec]VA 2/3[/vec]
On montre que la relation précédente est vrai aussi pour des vecteurs non parallèles. Ci-dessous, un bateau 1 représenté en vue de dessus tente de traverser un fleuve 2, dont le courant par rapport à la berge 3 n'est pas négligeable. La vitesse du bateau 1 par rapport à la berge 3 est égale à la somme vectorielle de la vitesse du bateau 1 par rapport au fleuve 2 et de la vitesse du fleuve 2 rapport à la berge 3.

Pour un point A lié au bateau :
[vec]VA 1/3[/vec] = [vec]VA 1/2[/vec] + [vec]VA 2/3[/vec]
Dans le cas général, quels que soient trois solides 1, 2 et 3 et un point M :
[vec]VM 1/2[/vec] = [vec]VM 1/3[/vec] + [vec]VM 3/2[/vec]
Cette relation se nomme relation de composition des vecteurs vitesse.
[vec]VM 1/2[/vec] = - [vec]VM 2/1[/vec]
Les deux vecteurs vitesse sont directement opposés. Ils ont le même support.
Considérons une roue 1 roulant sans glisser sur une route 2. Sur le schéma ci-dessous, la trajectoire d'un point lié à la roue est représentée.

Au point A, la trajectoire admet une tangente verticale.
Pour qu'une vitesse change de sens tout en conservant la même direction (verticale dans le cas présent), il est nécessaire que cette vitesse soit nulle à un instant donné. Intuitivement, on conclue que la vitesse au point A est nulle.
D'une manière générale, si deux solides 1 et 2, en contact ponctuel, A étant le point de contact, roulent sans glisser l'un sur l'autre alors :
Soient :
Si le solide 1 glisse sur le solide 2, alors la direction de [vec]VA 1/2[/vec] est parallèle au plan P.
