CINETIQUE
Introduction
La cinétique est la partie de la mécanique où l'on étudie
les mouvements des solides, en prenant en compte les masses et les inerties.
Elle permet, entre autres, de définir le torseur cinétique à partir duquel on pourra déterminer le torseur dynamique.
Centre d'inertie
Le centre d'inertie ou centre de masse d'un solide est le point central de toutes les masses.
Il est confondu avec le centre de gravité si on admet que le champ de pesanteur est localement constant.
Un solide peut fréquemment se décomposer en n éléments
dont on connaît les centres d'inertie Gi et les masses mi.
Soit O un point quelconque. La position du centre d'inertie G du solide se calcule avec la relation ci-dessous.
[vec]OG[/vec] =
[div]m1.[vec]OG1[/vec]+
m2.[vec]OG2[/vec]+...+
mn.[vec]OGn[/vec][sur]
m1+m2+...+mn[/div]
m1+m2+...+mn
représente la masse totale du solide.
Pour des raisons pratiques, le point O est généralement l'origine du repère
dans lequel s'écrivent les coordonnées des points Gi.
Moment d’inertie par rapport à un axe
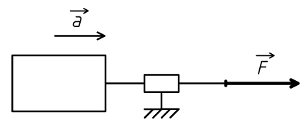
Prenons l'exemple de deux solides, l'un en liaison glissière avec un référentiel fixe, l'autre en liaison pivot.
Les liaisons sont parfaites.
Pour le mouvement de translation, le principe fondamental de la dynamique permet d'écrire :
F = m . ∂
La force F nécessaire pour déplacer le solide en translation est proportionnelle :
- A la masse m du solide.
- A son accélération ∂.
La relation équivalente, pour le mouvement de rotation, s'écrit :
C = J . Ω
La couple C nécessaire pour entraîner le solide en rotation est proportionnel :
- Au moment d'inertie J du solide par rapport à l'axe de rotation.
- A son accélération angulaire Ω.
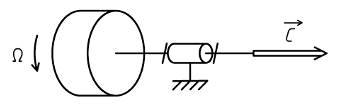
Le moment d'inertie constitue donc, en quelque sorte, l'équivalent de la masse pour un mouvement de rotation.
Il est utilisé en dynamique, mais également pour calculer l'énergie cinétique :
- Cas d'un mouvement de translation :
Ec = [div]1[sur]2[/div] . m . V 2
- Cas d'un mouvement de rotation :
Ec = [div]1[sur]2[/div] . J . ω 2
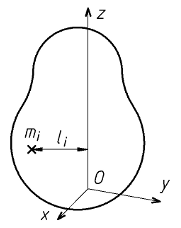
Définition
Soit mi la masse de chaque particule i d'un solide,
chaque particule étant située à la distance li de l'axe (Oz).
Le moment d'inertie du solide par rapport à l'axe (Oz),
en kg.m2, se calcule avec la relation ci-dessous.
JOz = [int][/int] mi . li 2
Considérons les cas suivants :
- Une boule ponctuelle située à la distance R de l'axe (Oz).
- Une barre effilée située à la distance R de l'axe (Oz) et parallèle à cet axe.
- Un anneau fin de rayon R et d'axe (Oz).
- Un tube de faible épaisseur de rayon R et d'axe (Oz).
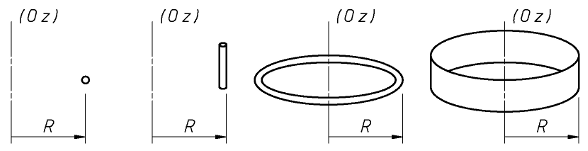
A chaque fois, toute la matière constituant le solide se trouve une distance unique de l'axe (Oz).
Les moments d'inertie par rapport à l'axe (Oz) se calculent alors avec la même relation ci-dessous.
On note m la masse totale du solide.
JOz = m . R2
Moments d'inertie de quelques volumes élémentaires
Pour les solides suivants, de masse m et le centre de masse G,
la résolution de l'intégrale donne les résultats ci-dessous.
| Cylindre plein | 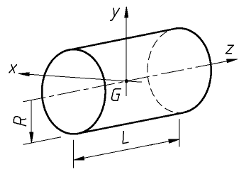 |
JGx = JGy =
[div]m . R2[sur]4[/div] +
[div]m . L2[sur]12[/div]
JGz =
[div]m . R2[sur]2[/div]
|
|---|
Tube d'épaisseur
non négligeable | 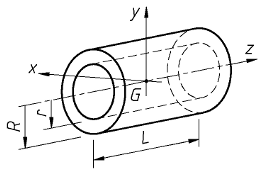 |
JGx = JGy =
[div]m . ( R2 + r2 )[sur]4[/div] +
[div]m . L2[sur]12[/div]
JGz =
[div]m . ( R2 + r2 )[sur]2[/div]
|
|---|
| Sphère pleine |  |
JGx = JGy = JGz =
[div]2 . m . R2[sur]5[/div]
|
|---|
Parallélépipède
rectangle | 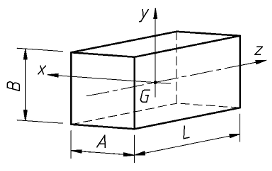 |
JGx =
[div]m . ( L2 + B2 )[sur]12[/div]
JGy =
[div]m . ( L2 + A2 )[sur]12[/div]
JGz =
[div]m . ( A2 + B2 )[sur]12[/div]
|
|---|
| Cône plein | 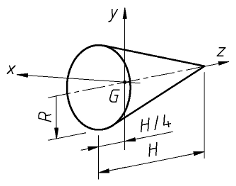 |
JGx = JGy =
[div]3 . m . R2[sur]20[/div] +
[div]3 . m . H2[sur]5[/div]
JGz =
[div]3 . m . R2[sur]10[/div]
|
|---|
Théorème de Huygens
Soit un solide de masse m et de centre de masse G.
Soit d la distance entre l'axe (Oz)
et l'axe (Gz).
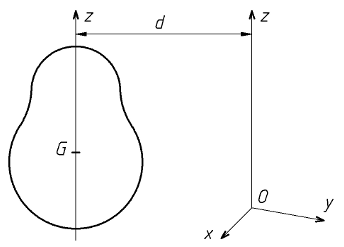
Le moment d'inertie JGz étant connu,
le moment d'inertie JOz se calcule avec la relation :
JOz = JGz + m . d2
Exemple
Considérons la barre fine de masse m et de longueur L ci-dessous :
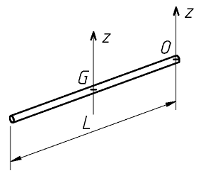
On sais que JGz =
[div]m . L2[sur]12[/div]
En appliquant le théorème de Huygens :
JOz = JGz + m . (L / 2)2 =
[div]m . L2[sur]12[/div] +
[div]m . L2[sur]4[/div] =
[div]m . L2[sur]3[/div]
Opérateur d'inertie
Moments d'inertie par rapport à un plan, un axe ou un point
Considérons un solide (S) et un repère orthonormé direct
(O; [vec]x[/vec], [vec]y[/vec], [vec]z[/vec] ).
Chaque particule Mi du solide (S) a pour masse mi et pour coordonnées
xi, yi et zi dans le repère
(O; [vec]x[/vec], [vec]y[/vec], [vec]z[/vec] ).
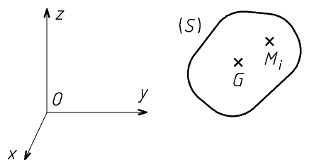
Le moment d'inertie, en kg.m2, se calcule par rapport à un plan, un axe ou un point.
Moment d'inertie par rapport au plan (Oxy)
JOxy =
[int][/int] mi . zi2
zi2
est le carrée de la distance entre le point Mi et le plan (Oxy).
Moment d'inertie par rapport à l'axe (Ox)
JOx =
[int][/int] mi .
( yi2 + zi2 )
yi2 + zi2
est le carrée de la distance entre le point Mi et l'axe (Ox).
Moment d'inertie par rapport au point O
JO =
[int][/int] mi .
( xi2 + yi2 + zi2 )
xi2 + yi2 + zi2
est le carrée de la distance entre les points Mi et O.
Propriétés
- Le moment d'inertie est toujours positif ou nul.
- JO = JOxy + JOxz + JOyz
- JOx = JOxy + JOxz
Produits d'inertie
Le produit d'inertie, en kg.m2, se définit par rapport à deux axes.
Produit d'inertie par rapport aux axes (Ox) et (Oy)
Pxy =
[int][/int] mi . xi . yi
Propriétés
- Pxy est algébrique.
- Si (Oxy) est un plan de symétrie, alors
Pxz = Pyz = 0.
- Si (Oxy) et (Oxz) sont deux plans de symétrie, alors
Pxy = Pxz = Pyz = 0.
Opérateur d'inertie
Définition
L'opérateur d'inertie se nomme également matrice d'inertie ou tenseur d'inertie.
Il se calcule en un point donné.
[mat]JO[/mat] = [cro]
[vert]JOx
-Pxy
-Pxz[/vert]
[vert]-Pxy
JOy
-Pyz[/vert]
[vert]-Pxz
-Pyz
JOz[/vert]
[/cro]
Propriété
Quel que soit le solide (S), il est possible de trouver un repère
( G; [vec]x1[/vec],
[vec]y1[/vec], [vec]z1[/vec] )
de sorte que tous les produits d'inertie soient tous nuls. L'opérateur d'inertie s'écrit alors :
[mat]JG[/mat] = [cro]
[vert]JGx1
0
0[/vert]
[vert]0
JGy1
0[/vert]
[vert]0
0
JGz1[/vert]
[/cro]
Le point G est le centre d'inertie du solide.
Les axes (Gx1), (Gy1) et (Gz1) sont les axes principaux d'inertie.
Les moments correspondants sont les moments principaux d'inertie.
Moment d'inertie par rapport à un axe quelconque
Soit une droite Δ passant par O, de vecteur unitaire [vec]u[/vec].
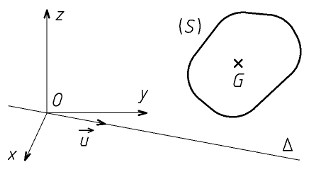
Le moment d'inertie JΔ du solide (S) par rapport à la droite Δ s'obtient avec la relation :
JΔ =
[vec]u[/vec] . [mat]JO[/mat] . [vec]u[/vec]
Si a, b et c sont les coordonnées du vecteur [vec]u[/vec] dans le repère
(O; [vec]x[/vec], [vec]y[/vec], [vec]z[/vec] ),
alors :
JΔ =
a2. JOx +
b2. JOy +
c2. JOz -
2.a.b.Pxy -
2.b.c.Pyz -
2.a.c.Pxz
Torseur cinétique
Quantité de mouvement
Soit une particule de masse m se déplaçant à la vitesse V.
La quantité de mouvement de cette particule, en kg.m/s, se calcule avec la relation ci-dessous.
Q = m . V
Torseur cinétique
Le torseur cinétique est le torseur des quantités de mouvement d'un solide par rapport à un référentiel donné.
Il comporte la résultante cinétique [vec]Rc[/vec]
et le moment cinétique [vec]Mc[/vec].
Résultante cinétique
[vec]Rc[/vec] = m . [vec]VG[/vec]
m : Masse de solide, en kg.
[vec]VG[/vec] : Vitesse du centre d'inertie G du solide, en m/s.
Moment cinétique
Le moment cinétique se calcule simplement dans deux cas particuliers.
Lorsque l'opérateur d'inertie est calculé au centre d'inertie G du solide
ou lorsqu'il est calculé en un point fixe O.
Si l'opérateur d'inertie est calculé au centre d'inertie G :
[vec]McG[/vec] = [mat]JG[/mat] . [vec]Ω[/vec]
Si l'opérateur d'inertie est calculé en un point fixe O :
[vec]McO[/vec] = [mat]JO[/mat] . [vec]Ω[/vec]
[vec]Ω[/vec] : Vecteur vitesse de rotation, en rad/s.
Energie cinétique
L'énergie cinétique d'un solide en mouvement
est égale à la moitié du comoment du torseur cinétique par le torseur cinématique.
Ec = [div]1[sur]2[/div] {C}⊗{V}
Dans le cas où les deux torseurs sont écrits au centre d'inertie G :
Ec = [div]1[sur]2[/div] .
[acc][bg]G[/bg][vert]m . [vec]VG[/vec]
[mat]JG[/mat] . [vec]Ω[/vec][/vert][/acc] ⊗
[acc][bg]G[/bg][vert][vec]Ω[/vec]
[vec]VG[/vec][/vert][/acc] =
[div]1[sur]2[/div] . m . VG 2 +
[div]1[sur]2[/div] . [mat]JG[/mat] . Ω 2