Depuis la nuit des temps, les humains se posent régulièrement ces questions :
A quoi ressemble notre environnement, au delà de ce que nous voyons?
Où nous situons-nous, sur la carte géographique?
Comment atteindre l'endroit souhaité?
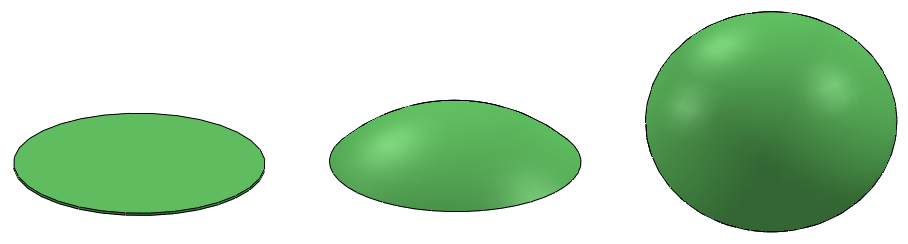
En négligeant le relief, la Terre, plate localement,
devient une portion de sphère sur une échelle plus grande,
une sphéroïde (sphère légèrement aplatie aux pôles) dans son ensemble .
Définitions
De manière générale, la position se détermine par des coordonnées
définies dans un repère lié à un référentiel. L'exemple ci-dessous
montre des coordonnées cartésiennes xP et yP
du point P dans le repère ( O; i, j )
lié à la maison.
Référentiel
Solide indéformable servant de référence pour repérer les positions, les mouvements.
Repère
Liste d'objets mathématiques formant un système de référence.
Un repère est lié au référentiel.
Le repère cartésien, un des plus commun, comporte une origine et une base de vecteurs.
Le repère cartésien :
Peut être plan ou spatial.
Est généralement orthonormé direct.
Coordonnées
Valeurs numériques définies par rapport au repère choisi pour localiser un point,
caractériser un vecteur. Les coordonnées peuvent être :
Cartésiennes.
Polaires.
Cylindriques.
Sphériques.
Géographiques.
Repères Historiques
Date
Evènement
Antiquité
Premières cartes du monde (Ératosthène, Ptolémée).
1736
Premier chronomètre de marine créé par John Harrison, permettant de déterminer la longitude.
1978
Lancement du premier satellite GPS (Global Positioning System).
2000
GPS opérationnel pour un usage civil (mode dégradé disponible depuis 1995).
2001
Logiciel Earth Viewer proposé par société Keyhole, racheté par Google en 2004 et qui devient Google Earth.
2004
Création d'OpenStreetMap, plateforme collaborative qui fournit des données cartographiques.
2006
Création de Géoportail, site national s'appuyant sur les données de l'IGN pour fournir des données sur le territoire français.
2016
Système européen de navigation par satellite Galiléo partiellement opérationnel.
Cartographie
Latitude et longitude
Pour repérer précisément n’importe quel point sur la Terre,
on a tracé sur le globe terrestre un quadrillage de lignes imaginaires :
Les parallèles et les méridiens.
Les parallèles sont des cercles parallèles à l’Equateur.
Ils permettent de situer un lieu par rapport au pôle Nord ou au pôle Sud.
Les méridiens sont des demi-cercles (ou demi-ellipses) reliant les deux pôles.
Ils permettent de situer un lieu par rapport à l’Est ou à Ouest.
Les coordonnées géographiques d'un point s’expriment avec la latitude et la longitude,
dans le système sexagésimal :
La latitude est l’angle entre un point et l’équateur, en degrés, minutes et secondes,
en précisant si on se trouve au Nord ou au Sud.
La longitude est l’angle entre un point et le méridien de Greenwich, en degrés, minutes et secondes,
en précisant si on se trouve vers l’Ouest ou vers l’Est.
Exemples
Ville
Latitude
Longitude
Lyon
45° 45' 35" nord
4° 50' 32" est
Bayonne
43° 29' 37" nord
1° 28' 30" ouest
Complément
Les coordonnées géographiques s’expriment aussi avec l'altitude, distance verticale
entre un point donné et le niveau de la mer.
Le mille marin (ou mille nautique), égal à 1852 m, est la longueur d'un arc de méridien terrestre
dont les extrémités diffèrent d'une minute en latitude.
Un nœud (symbole kn, kt ou nd) est égal à un mille marin par heure, soit 1,852 km/h.
Systèmes sexagésimal et décimal
La latitude ou la longitude s'exprime également avec un nombre décimal en degrés, positif ou négatif.
La latitude est positive au Nord de l'équateur et négative au Sud.
La longitude est positive à l'Est du méridien de Greenwich et négative à l'Ouest.
Exemples
Ville
Système sexagésimal
Système décimal
Latitude
Longitude
Latitude
Longitude
Lyon
45° 45' 35" nord
4° 50' 32" est
45.7597°
4.8422°
Bayonne
43° 29' 37" nord
1° 28' 30" ouest
43.4936°
-1.4750°
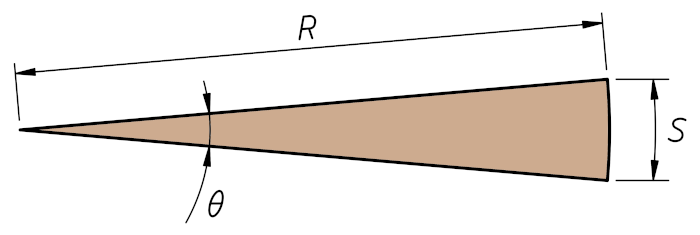
Quelques longueurs d'arcs terrestres
On utilise la formule : S = R . θ
S : Longueur de l'arc terrestre, en km
R : Rayon de la Terre (6370 km)
θ : Angle de l'arc terrestre, en rad (1 tr = 2π rad = 360°)
Angle d'arc terrestre
Longueur de l'arc
1°
6370 ⋅ π180 = 111 km
1'
6370 ⋅ 160 ⋅ π180
= 1,852 km = 1852 m
1"
6370 ⋅ 13600 ⋅ π180
= 0,031 km = 31 m
0,0001°
6370 ⋅ 0,0001 ⋅ π180 = 0,011 km = 11 m
Planisphères
Un planisphère représente la surface sphérique de la Terre sur une surface plane.
Il s'obtient à l'aide d'une projection cartographique.
Il existe de nombreuses projections cartographiques différentes.
Exemples
Projection de Behrmann
Projection de Mollweide
Projection de Goode
Planisphère en projection de Mercator
Cette projection possède la propriété intéressante de conserver les angles.
Pour cette raison, elle est majoritairement utilisée en cartographie électronique :
OpenStreetMap, Géoportail, Google Maps...
Echelles cartographiques
L'échelle d'une carte imprimée sur une feuille de papier est le rapport
entre une longueur mesurée sur la carte et la longueur réelle sur le terrain.
Elle s'indique de deux manières :
L'échelle numérique se note sous la forme 1:X, signifiant que 1 cm sur la carte
représente X cm sur le terrain.
L'échelle graphique se représente par un segment gradué dessiné sur la carte.
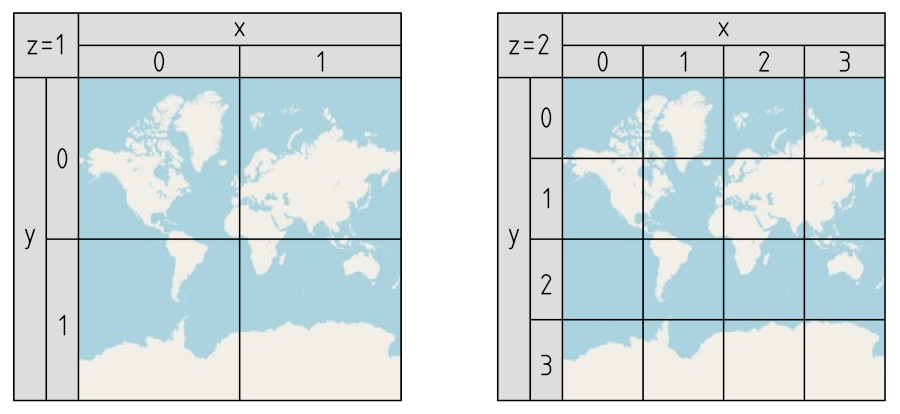
Exemple : Projet OpenStreetMap
Différents projets, tels Google Maps, Géoportail ou Mappy, se basent sur des morceaux de cartes,
nommés tuiles (title en anglais) pavés ou carreaux, de formes carrée ou rectangulaire, de tailles
variables, juxtaposés pour former des cartes complètes.
Dans le cas du projet OpenStreetMap, les tuiles :
Sont au format png.
Mesurent 256x256 pixels.
Une tuile se retrouve à l'adresse :
http://tile.openstreetmap.org/z/x/y.png
z : Valeur du zoom, nombre entier allant de 0 à 18.
x : Partie entière de la valeur calculée avec la formule ci-dessous, lon étant la longitude en degrés.
x =
lon + 180360 ⋅ 2 z
y : Partie entière de la valeur calculée avec la formule ci-dessous, lat étant la latitude en degrés.
La géolocalisation est la localisation à l'aide des coordonnées géographiques.
Elle repose sur le principe de la triangulation, technique permettant de déterminer
la position d'un point à partir de points de référence connus. On distingue :
La triangulation, par relevé de directions.
La trilatération ou triangulation par relevé de distances.
Navigation maritime autrefois
Les marins traçaient leur position sur les cartes marines de deux manières :
Lors des navigations hauturières, la cote disparaissant sous l'horizon,
ils effectuaient diverses mesures et calculs à l'aide :
D'un sextant, indiquant la hauteur d'un astre par rapport à l'horizon.
D'une montre de marine, indiquant l'heure au méridien de Greenwich.
D'éphémérides nautiques, tableaux de valeurs relatifs aux passages des astres.
Lors des navigations côtières, la côte restant visible, ils mesuraient les azimuts d'amers
à l'aide d'un compas de relèvement.
Complément
Un amer est un point de référence porté sur la carte, souvent un phare, un château d'eau, une antenne...
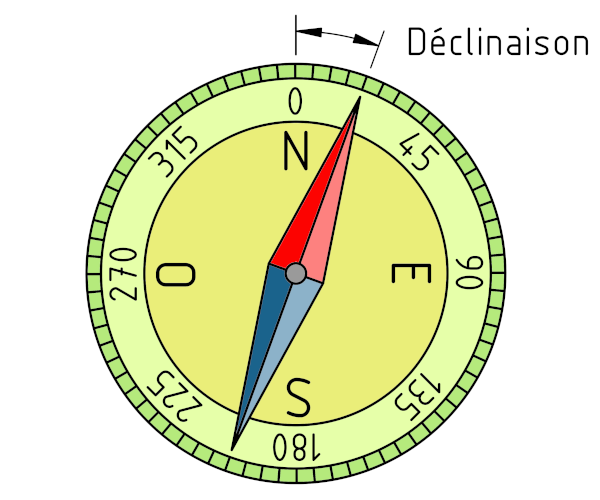
L’azimut d'un amer est l'angle entre la direction du Nord et celle de cet amer.
L'azimut vrai est l'angle entre la direction du Nord géographique et celle de l'amer.
L'azimut compas est l'angle entre la direction du Nord magnétique et celle de l'amer.
La déclinaison magnétique terrestre est l'angle entre la direction du Nord géographique et celle du Nord magnétique.
Azimut vrai = Azimut compas + Déclinaison
Un compas est gradué de 0° au Nord à 359° dans le sens horaire. L'Est est à 90° par exemple.
Le cap est la direction vers laquelle est orienté un navire (ou un avion).
La route est la trajectoire suivie par un navire par rapport au fond de la mer.
La dérive est l'angle entre le cap et la direction de la route.
Géolocalisation par émetteurs terrestres
Il existe plusieurs techniques :
Le LORAN (LOng RAnge Navigation) est un système de localisation utilisant les ondes électromagnétiques d'émetteurs terrestres fixes.
La position est déterminée à partir de la différence de temps de propagation entre les émetteurs.
Ce système, ancêtre du GPS, est de moins en moins utilisé.
Par exemple, l'émetteur LORAN-C de Soustons, fonctionnait à 100 kHz utilisait un pylône de 213 mètres de hauteur.
Il a été démantelé en 2017.
La radiogoniométrie est la détermination de la direction d'arrivée d'une onde électromagnétique.
Géolocalisation par satellites
Le GPS (Global Positioning System) est le système de positionnement par satellite américain, opérationnel depuis 1995.
Pour calculer la position, un récepteur GPS capte les signaux d'au moins quatre satellites.
Il existe d'autres systèmes de de positionnement :
Galileo, le système civil de l'Union Européenne, partiellement opérationnel depuis 2016.
GLONASS, le système russe, partiellement opérationnel en 1996, pleinement opérationnel depuis 2010.
Beidou-1, Beidou-2 et Beidou-3, de la République populaire de Chine, opérationnels respectivement en 2003, 2012 et 2020.
IRNSS, le système que l'Inde prépare actuellement.
QZSS (Quasi-Zenith Satellite System), le système que le Japon prépare actuellement.
Il existe plusieurs protocoles de communication pour les récepteurs.
Certains sont standardisés comme NMEA 0183 ou Sirf, d'autres propriétaires comme Garmin ou Delorme.
Concernant les trames NMEA-183 (National Marine Electronics Association), normalisées,
facilement décodables et très utilisées, il en existe 6 types : GGA, GLL, GSA, GSV, VTG et RMC.
L'exemple de trame présenté ci-dessous est de type GGA.
Repère
Interprétation
1
Type de trame : Récepteur GPS et trame GGA
2
Heure d'envoi de la trame : 9 h 20 min 25 s
3
Latitude : 43° 52' 29,9" nord
4
Longitude : 1° 19' 30,6" ouest
5
Type de positionnement : 1 pour GPS
6
Nombre de satellites utilisés pour le calcul
7
Précision horizontale
8
Altitude : 9,8 m
9
Autres informations
Géolocalisation par Wi-Fi, par GSM
En ville, la localisation peut se faire par la détection des bornes Wi-Fi
(de l'anglais Wireless Fidelity)) ou des antenne-relais de téléphonie mobile proches.
Mobilité
Le calcul d’itinéraire fait intervenir la notion de graphe et fait appel à divers algorithmes.
Modélisation d'un réseau de transport
Un réseau routier, par exemple, est constitué d'un ensemble de villes reliées par des routes.
Il se représente par un graphe.
Les sommets : Les villes, les croisements de routes.
Les arêtes : Les routes qui relient les villes.
Les arêtes du graphe se pondèrent. Le poids de chaque arête représente alors :
Les distances entre deux villes, en km.
Les temps de trajet entre deux villes, en min.
Les prix des péages d'autoroute, en €.
...
Les sommets du graphe se pondèrent également. Le poids de chaque sommet représente alors :
Le nombre de feux tricolores.
Le temps pour traverser la ville, en min.
...
Calcul d'itinéraire
Trouver l'itinéraire le plus court pour se rendre d'une ville à l'autre est un problème complexe.
En effet, le nombre de chemins possibles est souvent très important.
Divers algorithmes permettent de résoudre ce problème.
L'algorithme de Dijkstra est l'un des plus connus.