Ce petit robot mobile roulant à entraînement différentiel, à construire soi-même, se pilote par WiFi, avec un téléphone portable par exemple.
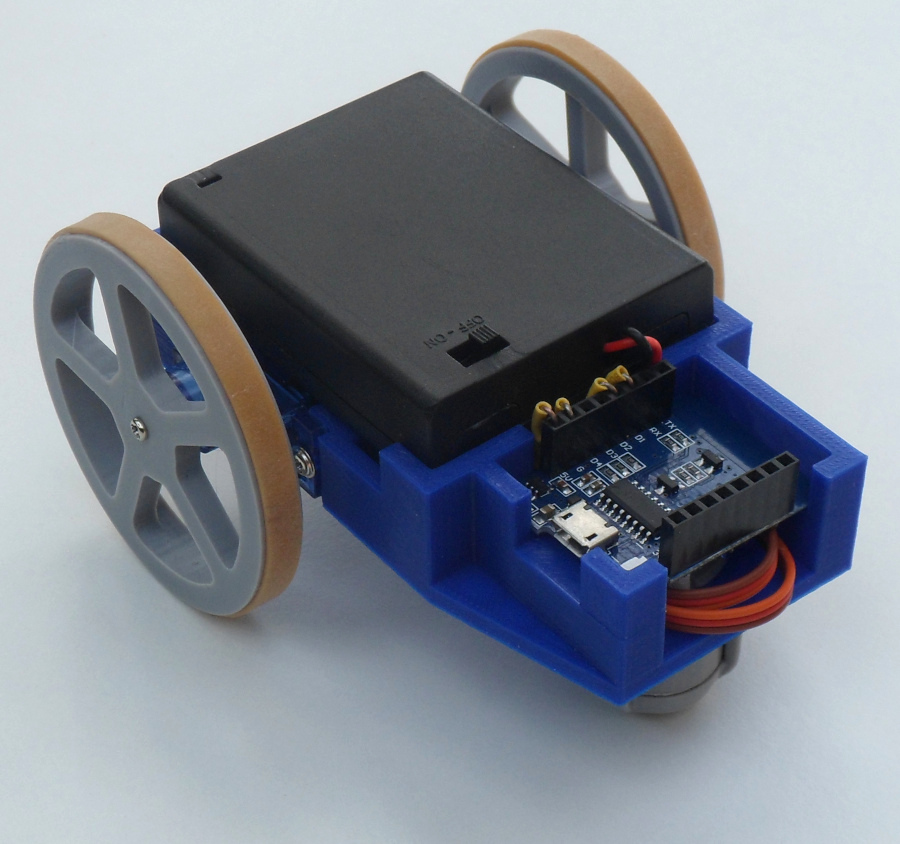
Il se compose :
Nomenclature :
| 9 | 2 | Bracelet élastique (pneu) | Ø 80 × 5 | |
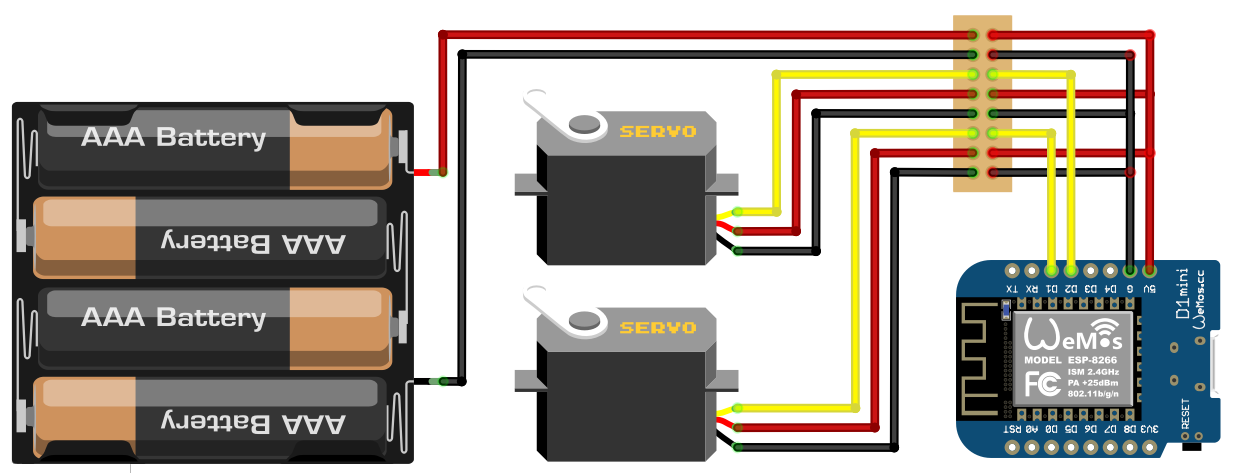
| 8 | 1 | Boîtier à piles avec interrupteur | 4 piles AAA/LR3 | |
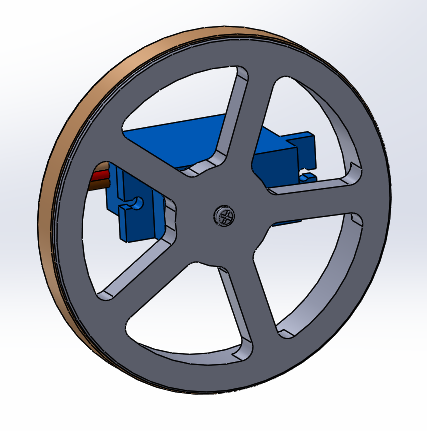
| 7 | 2 | Servomoteur à rotation continue | FS90R | |
| 6 | 1 | Carte Wemos D1 mini | ||
| 5 | 2 | Roue | PLA | |
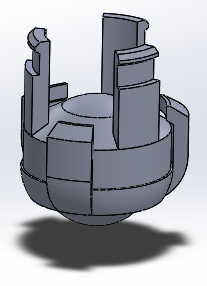
| 4 | 1 | Bouchon | PLA | |
| 3 | 1 | Bille | PLA | |
| 2 | 1 | Appui | PLA | |
| 1 | 1 | Châssis | PLA | |
| REP. | NB. | DESIGNATION | MATIERE | OBS. |
|---|
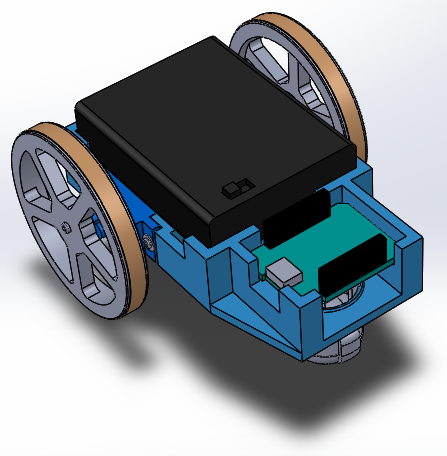
Ces éléments ayant été modélisés avec SolidWorks (version 2019), il s'agit maintenant de les assembler pour s'assurer que le montage sera possible. Pour commencer :
support).
#include <ESP8266WiFi.h>
#include <ESP8266mDNS.h>
#include <Servo.h>
const char* ssid = "ROBOT_DIFFERENTIEL";
const char* password = ""; // mot de passe avec soit 0 caractères soit 8 ou plus
const char* hote = "ihm"; // taper http://ihm.local dans la barre d'adresses du navigateur
IPAddress local_IP(192,168,0,222);
IPAddress gateway(192,168,4,9);
IPAddress subnet(255,255,255,0);
WiFiServer server(80);
Servo servogauche;
Servo servodroit;
int etat = 0;
void setup() {
Serial.begin(9600);
delay(50);
Serial.println("");
WiFi.softAPConfig(local_IP, gateway, subnet);
Serial.println("Point d'accès Wifi configuré");
WiFi.softAP(ssid,password);
Serial.println("Point d'accès Wifi démarré");
Serial.print("Adresse IP du point d'accès Wifi : ");
Serial.println(WiFi.softAPIP());
MDNS.begin(hote);
Serial.println("Multicast DNS démarré");
server.begin();
Serial.println("Serveur Web démarré");
Serial.println("");
}
void loop() {
// Vérifier si le client est connecté
WiFiClient client = server.available();
if (!client) { return; }
// Attendre jusqu'à ce que le client envoie sa requête
Serial.println("Nouveau client");
while (!client.available()) { delay(100); }
// Lire la première ligne de la requête
String request = client.readStringUntil('\r');
Serial.println(request);
client.flush();
// Analyser la requête
if (request.indexOf("avance") != -1) { etat = 1; }
else if (request.indexOf("recule") != -1) { etat = 2; }
else if (request.indexOf("gauche") != -1) { etat = 3; }
else if (request.indexOf("droite") != -1) { etat = 4; }
else { etat = 0; }
// Agir sur le système
servogauche.attach(5);
servodroit.attach(4);
if (etat == 0) {
servogauche.detach();
servodroit.detach();
}
if (etat == 1) {
servogauche.write(10);
servodroit.write(170);
}
if (etat == 2) {
servogauche.write(170);
servodroit.write(10);
}
if (etat == 3) {
servogauche.write(170);
servodroit.write(170);
}
if (etat == 4) {
servogauche.write(10);
servodroit.write(10);
}
// Retourner au client l'IHM
String html = "HTTP/1.1 200 OK\n"
"Content-Type: text/html\n\n"
"<!DOCTYPE html>"
"<html>"
"<head>"
"<meta charset=\"utf-8\">"
"<style>"
"body { background-color:#163; text-align:center; }"
"h1 { color:#cfc; }"
"div { line-height:0px; }"
"svg { width:150px; height:150px; }"
"a:hover { opacity:0.8; }"
"</style>"
"</head>"
"<body>"
"<h1>Le robot ";
if (etat == 0) html += "est à l'arrêt";
if (etat == 1) html += "avance";
if (etat == 2) html += "recule";
if (etat == 3) html += "vire à gauche";
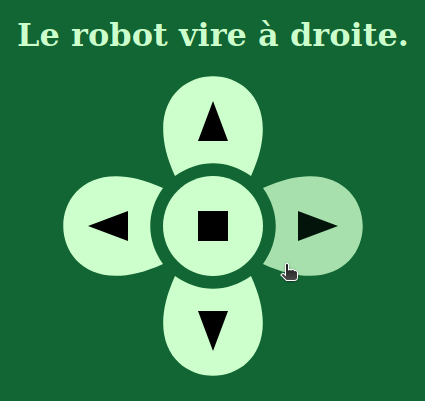
if (etat == 4) html += "vire à droite";
html += ".</h1>"
"<div>"
"<a href=\"/avance\"><svg viewBox=\"0 0 100 100\">"
"<path d=\"M 12 100 C 36 83 64 83 88 100 C 149 -33 -49 -33 12 100\" fill=\"#cfc\"/>"
"<path d=\"M 35 65 L 50 25 L 65 65\"/>"
"</svg></a>"
"<br>"
"<a href=\"/gauche\"><svg viewBox=\"0 0 100 100\">"
"<path d=\"M 100 12 C 83 36 83 64 100 88 C -33 149 -33 -49 100 12\" fill=\"#cfc\"/>"
"<path d=\"M 65 35 L 25 50 L 65 65\"/>"
"</svg></a><a href=\"/arrete\"><svg viewBox=\"0 0 100 100\">"
"<circle cx=\"50\" cy=\"50\" r=\"50\" fill=\"#cfc\"/>"
"<path d=\"M 35 35 H 65 V 65 H 35\"/>"
"</svg></a><a href=\"/droite\"><svg viewBox=\"0 0 100 100\">"
"<path d=\"M 0 12 C 133 -49 133 149 0 88 C 17 64 17 36 0 12\" fill=\"#cfc\"/>"
"<path d=\"M 35 35 L 75 50 L 35 65\"/>"
"</svg></a>"
"<br>"
"<a href=\"/recule\"><svg viewBox=\"0 0 100 100\">"
"<path d=\"M 12 0 C 36 17 64 17 88 0 C 149 133 -49 133 12 0\" fill=\"#cfc\"/>"
"<path d=\"M 35 35 L 50 75 L 65 35\"/>"
"</svg></a>"
"</div>"
"</body>"
"</html>\r\n";
client.print(html);
delay(100);
Serial.println("Client déconnecté\n");
}