La pince de bras manipulateur représentée sur le dessin d'ensemble sert à déplacer des objets. Elle fonctionne à l'énergie pneumatique, grâce à un vérin à simple effet interne.
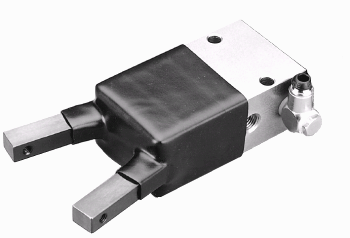
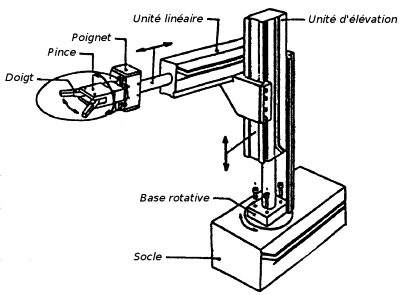
Elle se fixe à l'extrémité d'un bras manipulateur.
L'air comprimé rentre dans une chambre et exerce une pression sur le piston 2. La poussée sur le piston 2 se transmet aux phalanges 4 par les biellettes 5. Le rappel du piston et de la pince en position de repos (ouverte) s'obtient par deux ressorts 9, montés en parallèle.
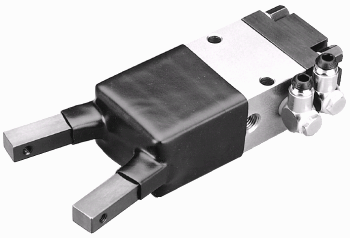
Sur la photo ci-dessous, un module a été rajouté à la base de la pince afin d'augmenter l'effort de serrage exercé par les doigts sur la pièce à manipuler.