
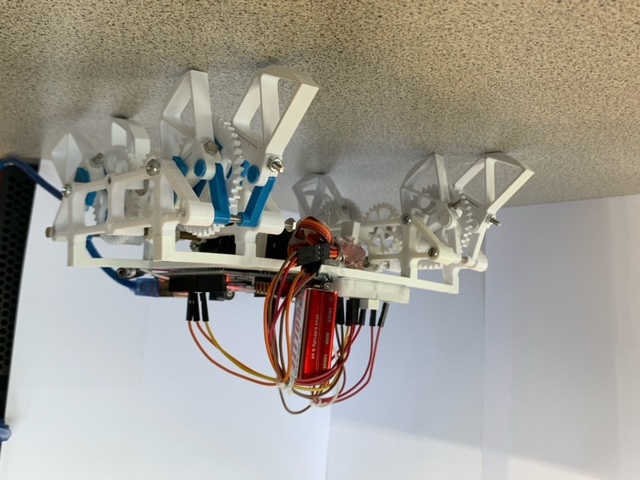
L'objectif du projet est de faire un robot marcheur basé sur le thème de Klann. Nous nous sommes inspirés d'un modèle pris sur internet pour la partie robotique, tout en modifiant et en créant certaines pièces pour qu'elles s'adaptent à notre robot.
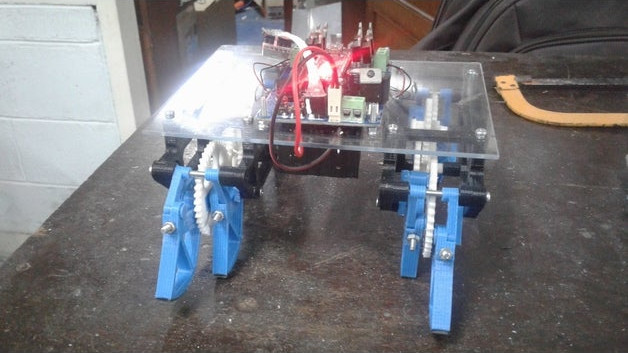
Projet Klann sur lequel nous nous sommes inspirés.
#includeServo leServo; Servo leServo1; void setup() { pinMode(7, OUTPUT); leServo.attach(9); leServo1.attach(10); Serial.begin(9600); } void loop() { if (Serial.available()) { // si des caractères sont envoyés char caractere = Serial.read(); if (caractere == 's') { // Stop digitalWrite(7, LOW); leServo.writeMicroseconds(1500); leServo1.writeMicroseconds(1500); } if (caractere == 'a') { // Avancer digitalWrite(7, HIGH); leServo.writeMicroseconds(1450); leServo1.writeMicroseconds(1550); } if (caractere == 'r') { // Reculer digitalWrite(7, HIGH); leServo.writeMicroseconds(1550); leServo1.writeMicroseconds(1450); } if (caractere == 'g') { // Tourner à gauche digitalWrite(7, HIGH); leServo.writeMicroseconds(1450); leServo1.writeMicroseconds(1450); } if (caractere == 'd') { // Tourner à droite digitalWrite(7, HIGH); leServo.writeMicroseconds(1550); leServo1.writeMicroseconds(1550); } Serial.print(caractere); } }
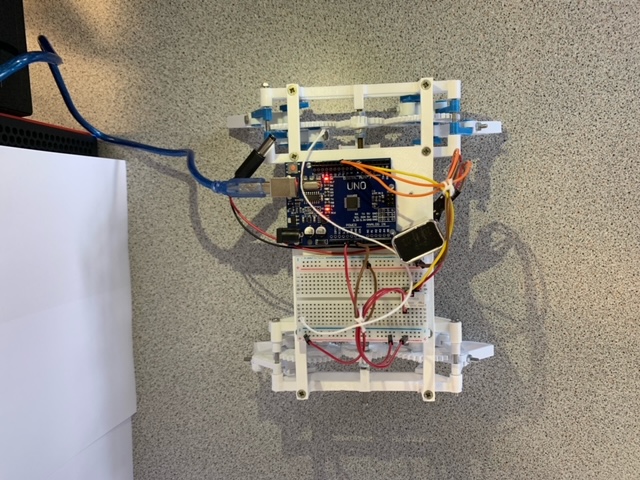
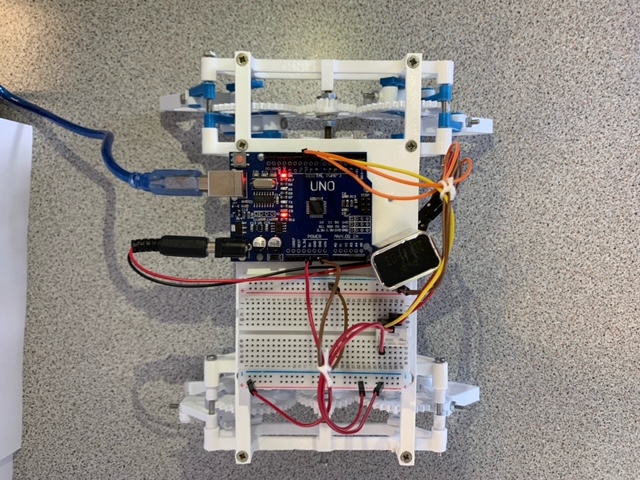
Les problèmes rencontrés ont été ont été le placement des servomoteurs ainsi que la pièce qui relie les servomoteurs aux engrenages et également lors de la démultiplication nous avons dû adapter de nouvelles roues dentées que nous avons créées.
Les améliorations possibles pour une version futures sont de mettre une nouvelle carte qui se gère avec le WIFI ce qui permet au robot d'être contrôlé à distance.