 ;
;
L'objectif du projet est de concevoir un robot parmis les quelque un aux choix et de le faire fonctionner grace a des lignes de code arduino et en le construisant physiquement avant de tester si il fonctionne ou non le projet est considére comme réussi une fois le robot en marche faisant des mouvements fluide et précis.
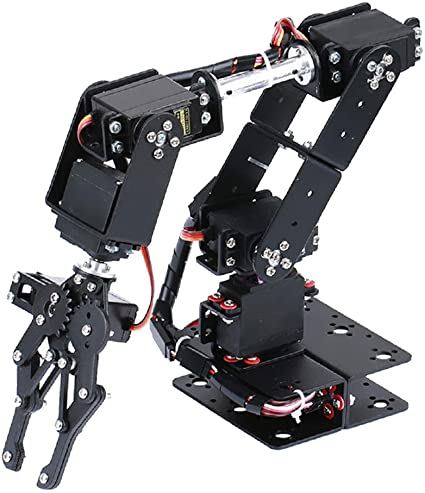
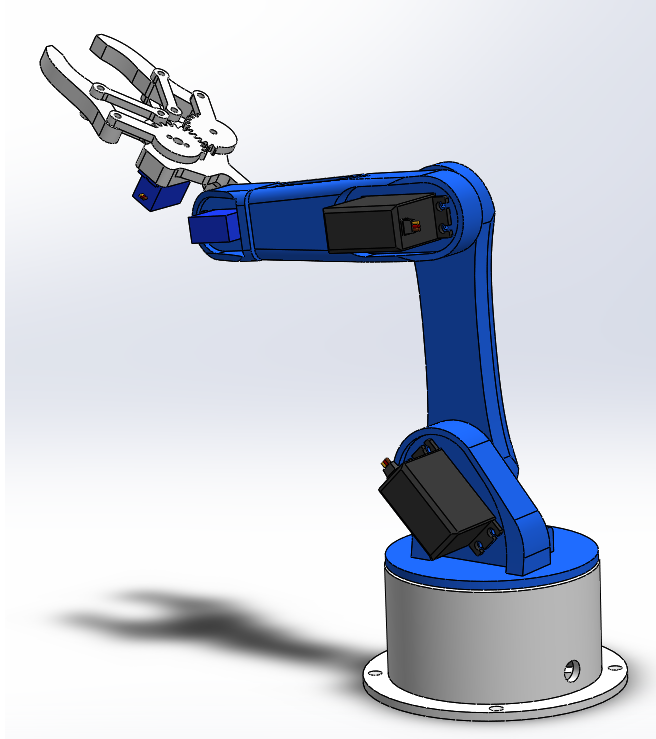
Nous avons choisi un robot similaire au modèle "6DOF DIY Servo Control Robot Robot Mechanical Arm for Arduino".
Le modèle suivant peut être imprimé en 3D : howtomechatronics.com/tutorials/arduino/diy-arduino-robot-arm-with-smartphone-control/
3 servos moteurs, 2 moteurs, une structure en plastique.
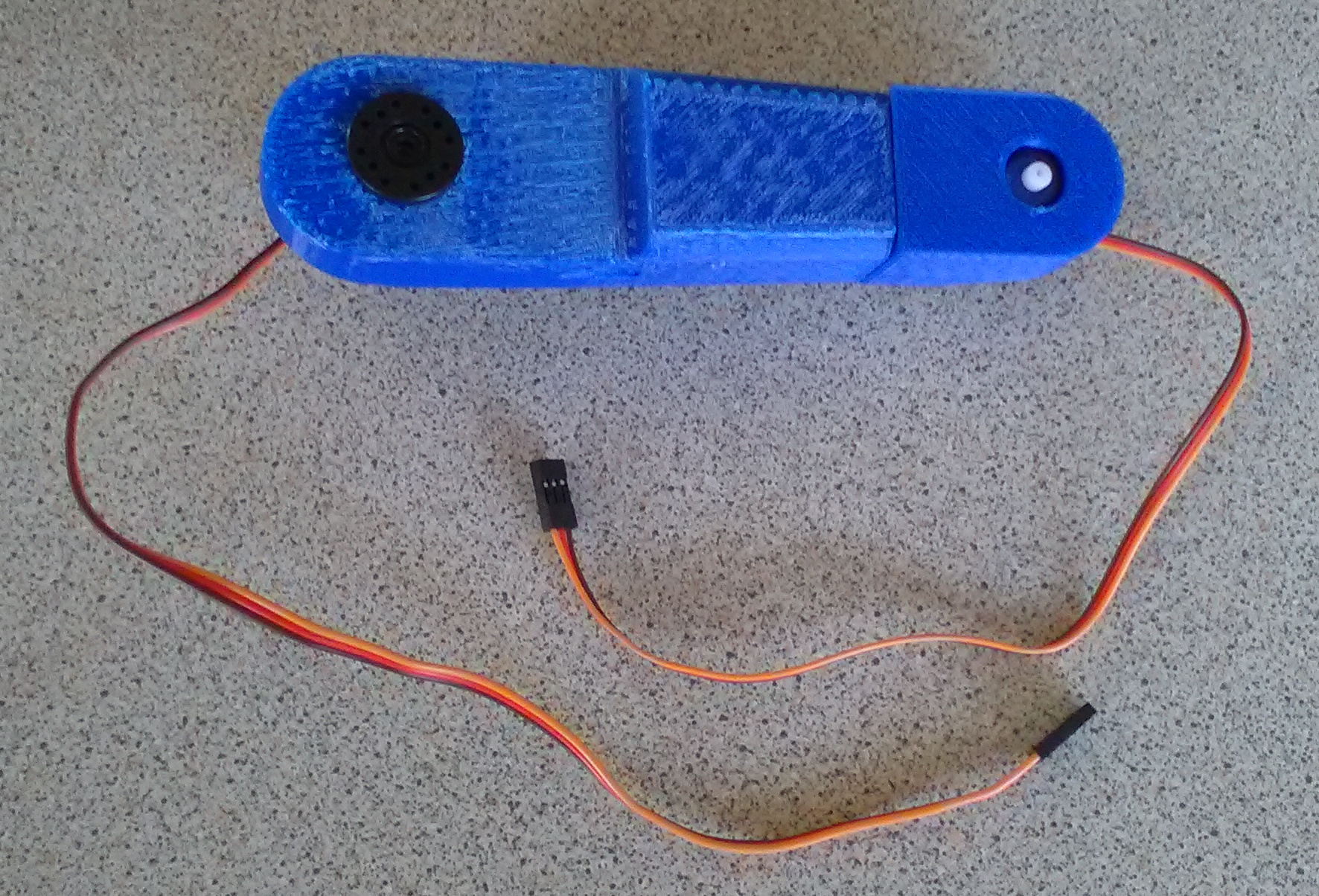
L'une des rotations, qui permettait de faire tourner la pince, n'était pas indispensable, nous avons donc fixé les deux pièces ensemble pour n'en former qu'une.
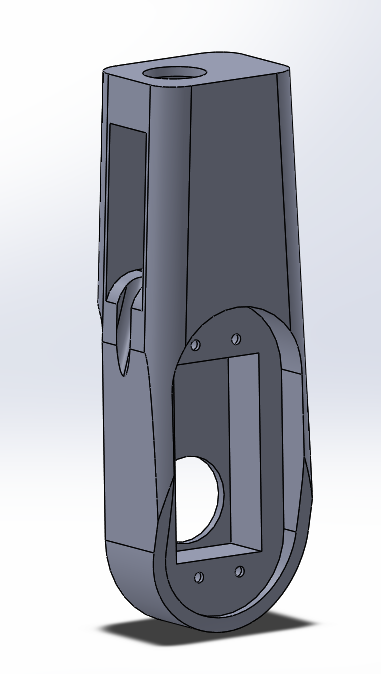
Les deux piéces de départ :
;
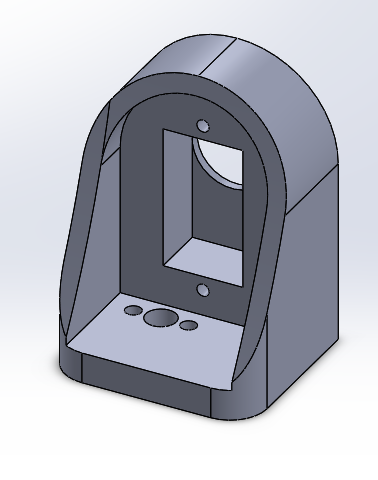
La pièce modélisée :

La pièce modifiée :
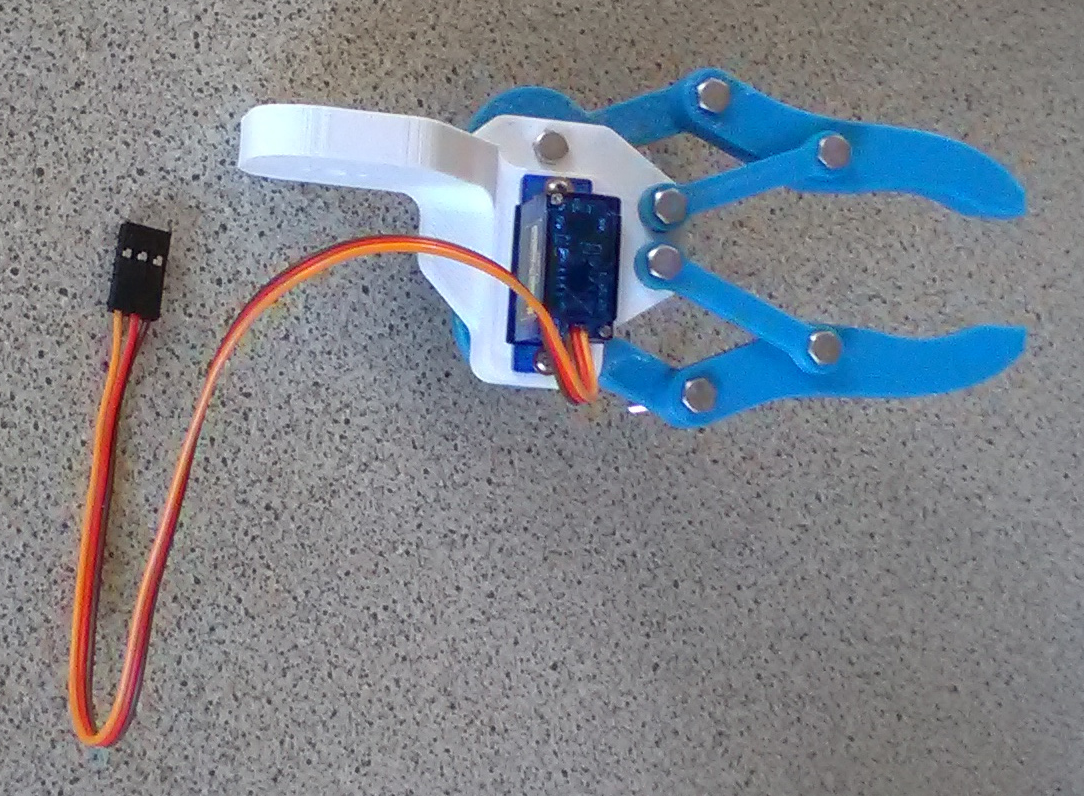
La pince :
Le robot en cours d'assemblage :

Les problèmes rencontrés ont été : vis incompatibles, pièces mal construites et, pour finir, le robot était impossible à terminer du fait des commandes trop longues et des mauvais outils.
Les améliorations possibles pour une version futures seraient de disposer des vis adéquates et des outils nécessaires à la finalisation de ce projet.