Compte Rendu de Projet : "BULLDOZER"
Date: 14 Mai 2024, Lycée Haroun Tazzief.
Rédigé par: Lelio F., Paul L., Ulysse C., Paul P.
Introduction
Ce document présente le compte rendu du projet intitulé "Bulldozer". Le projet à été mené dans le but de faire avancer un bulldozer miniature fait par nous même à l'aide d'ordinateur et d'imprimantes 3D.
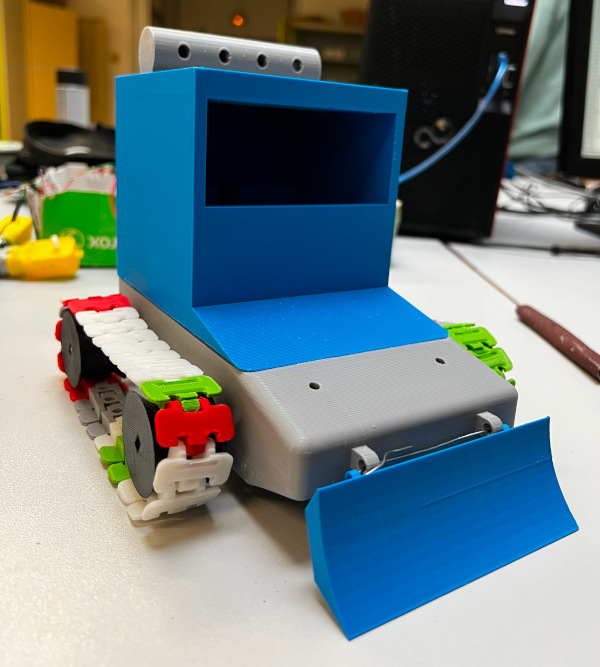
Notre but est de faire un bulldozer ressemblant à celui ci-dessous.

Objectifs
Les objectifs de ce projet sont les suivants :
- Imprimer toutes les pièces néscessaires pour la réalisation du bulldozer
- Ecrire un code pour faire avancer, tourner, reculer le bulldozer.
Méthodologie
La méthodologie adoptée pour ce projet comprenait plusieurs étapes clés :
- Étape 1 : La création des pièces
- Étape 2 : Le câblage et son schéma
- Étape 3 : Le code en arduino
La créations des pièces :
Les résultats obtenus sont les suivants :
| Modèle volumique | Pièce imprimée | Telecharger les pièces en fichier STL |
|---|---|---|
| Les chenilles | ||
| image illustrant le maillon en solidworks |  |
|
| Le chassis | ||
| Image illustrant le chassis sur solidworks | 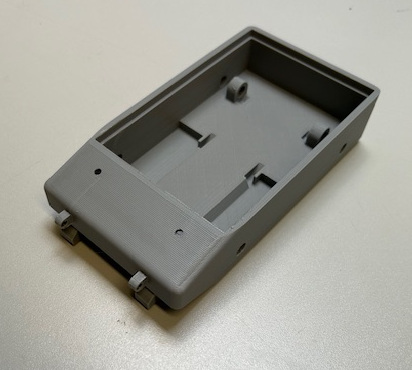 |
|
| Les engrenages | ||
| Image illustrant l'engrenage sur solidworks |  |
|
| Axes pour avant et arrière | ||
| Image illustrant les axes avant et arrière sur solidworks |  |
|
| La cabine | ||
| Image illustrant la cabine sur solidworks | 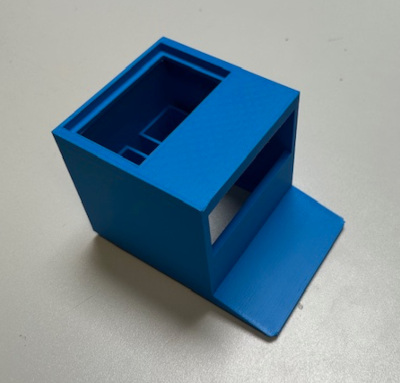 |
|
| La pelle | ||
| Image illustrant la pelle sur solidworks> | 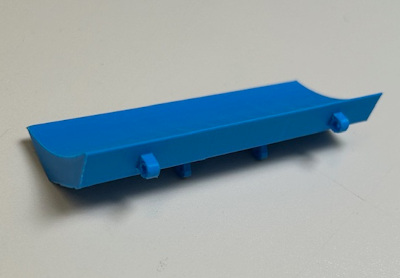 |
|
| Le couvercle de la cabine | ||
| Image illustrant le couvercle de la cabine sur solidworks |  |
|
Ensuite nous avons decidé de peindre les pièces pour que le bulldozer ressemble à celui montré au debut de la présentation.

Le câblage et son schéma
Les résultats obtenus sont les suivants :
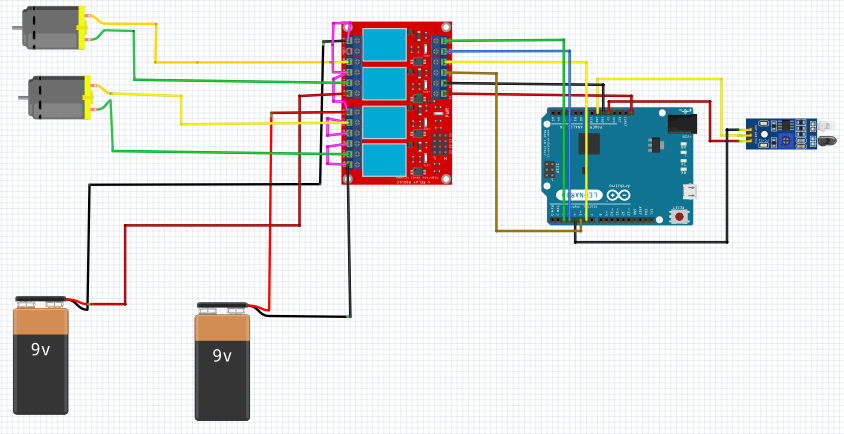
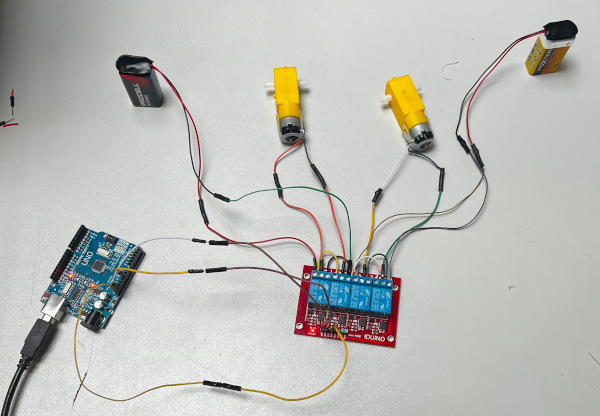
Nous avons commencé par câbler les moteurs et les piles à travers 4 relais sur la même carte en utilisant des ponts pour connecter les différents relais entre eux, ensuite nous avons soudé les fils aux moteurs et mis en place des gaines thermo-retractables pour ne pas faire de cour-circuit entre les fils s'ils se touchent à l'endroit de la soudure. Ensuite nous avons branché les 4 relais à une carte arduino, pour pouvoir télécommander ce bulldozer nous avons utilisé des capteurs infrarouges (les capteurs infrarouges utilisés) branchés à trois ports différents.
Le code arduino
Les résultats obtenus sont les suivants :
#include <IRremote.h>
// Définition des broches pour les moteurs
const int moteur1Pin1 = 10;
const int moteur1Pin2 = 11;
const int moteur2Pin1 = 6;
const int moteur2Pin2 = 5;
IRrecv irrecv(4);
decode_results results;
void setup() {
Serial.begin(9600); // Démarrer la communication série
irrecv.enableIRIn(); // Démarrer le récepteur IR
pinMode(moteur1Pin1, OUTPUT);
pinMode(moteur1Pin2, OUTPUT);
pinMode(moteur2Pin1, OUTPUT);
pinMode(moteur2Pin2, OUTPUT);
Serial.println("Prêt à démarrer"); // Afficher un message sur le moniteur série
}
void loop() {
if (irrecv.decode(&results)) {
irrecv.resume();
// Contrôle des moteurs en fonction des valeurs de la télécommande
switch (results.value) {
case 16718055: // Avancer
Serial.println("Avancer");
avancer();
break;
case 16730805: // Reculer
Serial.println("Reculer");
reculer();
break;
case 16734885: // Tourner à gauche
Serial.println("Tourner à gauche");
tournerGauche();
break;
case 16716015: // Tourner à droite
Serial.println("Tourner à droite");
tournerDroite();
break;
case 16726215: // Arrêter
Serial.println("Arrêt");
arreter();
break;
default:
break;
}
}
}
// Fonction pour faire avancer le robot
void avancer() {
digitalWrite(moteur1Pin1, HIGH);
digitalWrite(moteur1Pin2, LOW);
digitalWrite(moteur2Pin1, HIGH);
digitalWrite(moteur2Pin2, LOW);
}
// Fonction pour faire reculer le robot
void reculer() {
digitalWrite(moteur1Pin1, LOW);
digitalWrite(moteur1Pin2, HIGH);
digitalWrite(moteur2Pin1, LOW);
digitalWrite(moteur2Pin2, HIGH);
}
// Fonction pour faire tourner le robot à gauche
void tournerGauche() {
digitalWrite(moteur1Pin1, LOW);
digitalWrite(moteur1Pin2, HIGH);
digitalWrite(moteur2Pin1, HIGH);
digitalWrite(moteur2Pin2, LOW);
}
// Fonction pour faire tourner le robot à droite
void tournerDroite() {
digitalWrite(moteur1Pin1, HIGH);
digitalWrite(moteur1Pin2, LOW);
digitalWrite(moteur2Pin1, LOW);
digitalWrite(moteur2Pin2, HIGH);
}
// Fonction pour arrêter le robot
void arreter() {
digitalWrite(moteur1Pin1, LOW);
digitalWrite(moteur1Pin2, LOW);
digitalWrite(moteur2Pin1, LOW);
digitalWrite(moteur2Pin2, LOW);
}
Les essais pour confirmer le fonctionnement des pièces
En permier nous avons essayer de faire tourner les engrenages pour faire avancer le bulldozer grâce aux chenilles en branchant les moteurs à des piles.
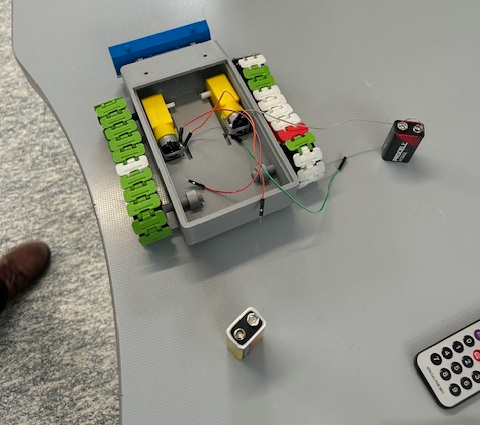
Ensuite nous avons assemblé les pieces pour savoir si elles s'assemblaient bien.
Conclusion
En conclusion, nous avons reussi à faire avancer un bulldozer miniature fait par nous même avec l'aide d'imprimantes 3d tel que La creality K1 et la idea maker. Et aussi grâce à l'aide de nos professeurs qui nous ont aidé durant le long du projet.