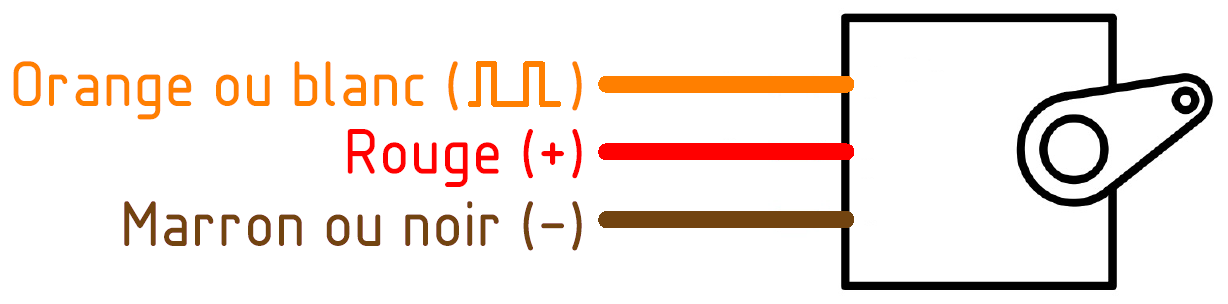
Un servomoteur se commande en lui envoyant un train d'impulsions électriques, aux caractéristiques suivantes :

Attention à respecter les couleurs pour le câblage. Une erreur... risque de détruire la carte Arduino!
Bien de l'utilisation de la bibliothèque Servo.h
ne soit pas indispensable,
elle simplifie l'écriture du code.
L'exemple ci-dessous permet d'obtenir un aller et retour répétitif.
#include <Servo.h> // on importe la bibliothèque Servo
Servo leServo; // on crée l’objet leServo issu de la classe Servo
void setup() {
leServo.attach(9); // la commande du servomoteur est reliée à son connecteur
}
void loop() {
leServo.write(20); // axe du servomoteur mis à la position -50°
delay(2000); // on attend que la position angulaire soit atteinte
leServo.write(170); // position angulaire à 50°
delay(2000); // nouvelle attente
}
Il est possible de ralentir la vitesse angulaire de l'axe du servomoteur,
à l'aide d'une boucle et de la fonction delay()
.
for (int i=0;i<180;i+=1) {
leServo.write(i);
delay(20);
}
L'utilisation de bibliothèques présente quelques inconvénients :
Il est donc toujours utile de savoir s'en passer.
int pinServo=9;
void placer(int angle) { // angle allant de 0 à 180
int impulsion=(int)(5.55*angle+1000);
for (int t=0;t<80;t++) { // boucle laissant au servo le temps d'atteindre sa position
digitalWrite(pinServo,HIGH);
delayMicroseconds(impulsion);
digitalWrite(pinServo,LOW);
delay(20);
}
}
void setup() {
pinMode(pinServo, OUTPUT);
}
void loop() {
placer(20); // position angulaire à -50°
delay(2000);
placer(170); // position angulaire à 50°
delay(2000);
}
La fonction map()
modifie la plage de variation d’une variable.
On écrit ainsi plus simplement :
int impulsion=map(angle, 0, 180, 1000, 2000);
writeMicroseconds()
La méthode writeMicroseconds()
définit directement la largeur des impulsions en μs.
Elle permet donc de définir environ 1000 valeurs différentes (1000 à 2000)
au lieu des 180 (0 à 180) avec la méthode write()
.
Pour s'adapter aux différents servomoteurs, la méthode attach()
prend deux paramètres optionnels, les largeurs minimale et maximale des impulsions en μs.
Les valeurs par défaut sont respectivemeent 544 et 2400.
leServo.attach(9, 1000, 2000);
Un servomoteur à rotation continue, ou servomoteur treuil, se commande de la même manière qu'un servomoteur classique, avec un train d'impulsions :
Exemple de code, avec la méthode writeMicroseconds()
:
#include <Servo.h>
Servo leServo;
void setup() {
leServo.attach(9);
}
void loop() {
leServo.writeMicroseconds(1700); // rotation dans un sens
delay(2000);
leServo.writeMicroseconds(1500); // stop
delay(1000);
leServo.writeMicroseconds(1300); // rotation dans l'autre sens
delay(2000);
leServo.writeMicroseconds(1500); // stop
delay(1000);
}
Le programme ci-dessous permet d'obtenir l'arrêt, les rotations dans les sens horaire ou trigonométrique en envoyant les caractères a, h et t depuis le moniteur série :
#include <Servo.h>
Servo leServo;
void setup() {
leServo.attach(9);
Serial.begin(9600);
}
void loop() {
if (Serial.available()) { // si des caractères sont envoyés
char caractere = Serial.read();
if (caractere == 'a') {
leServo.writeMicroseconds(1500);
}
if (caractere == 'h') {
leServo.writeMicroseconds(1300);
}
if (caractere == 't') {
leServo.writeMicroseconds(1700);
}
Serial.print(caractere);
}
}
Quelques difficultés surviennent parfois. Par exemple :
Ces difficultés peuvent se lever avec la méthode detach()
. Par exemple :
#include <Servo.h>
Servo servo1, servo2;
int pos;
void setup() { }
void loop() {
servo1.attach(9);
servo2.attach(10);
for(pos=10; pos<=170; pos++) {
servo1.write(pos);
servo2.write(180-pos);
delay(15);
}
for(pos=170; pos>=10; pos--) {
servo1.write(pos);
servo2.write(180-pos);
delay(15);
}
servo1.detach();
servo2.detach();
delay(2500);
}